——来自迪文开发者论坛
本期为大家推送迪文开发者论坛获奖开源案例——智能培养室。工程师通过Modbus协议实现了T5L控制加热、风机控温功能,还可调节电源功率实现模拟光照功能。系统可根据屏幕上设定的参数自动运行,并保存故障历史记录。
【演示视频】
完整开发资料含迪文屏DGUS工程资料与C51代码,获取方式:
1. 前往迪文开发者论坛获取:/index.html/forum.php?mod=viewthread&tid=9586&extra=page%3D1
2. 微信公众号中回复“智能培养室”获取。
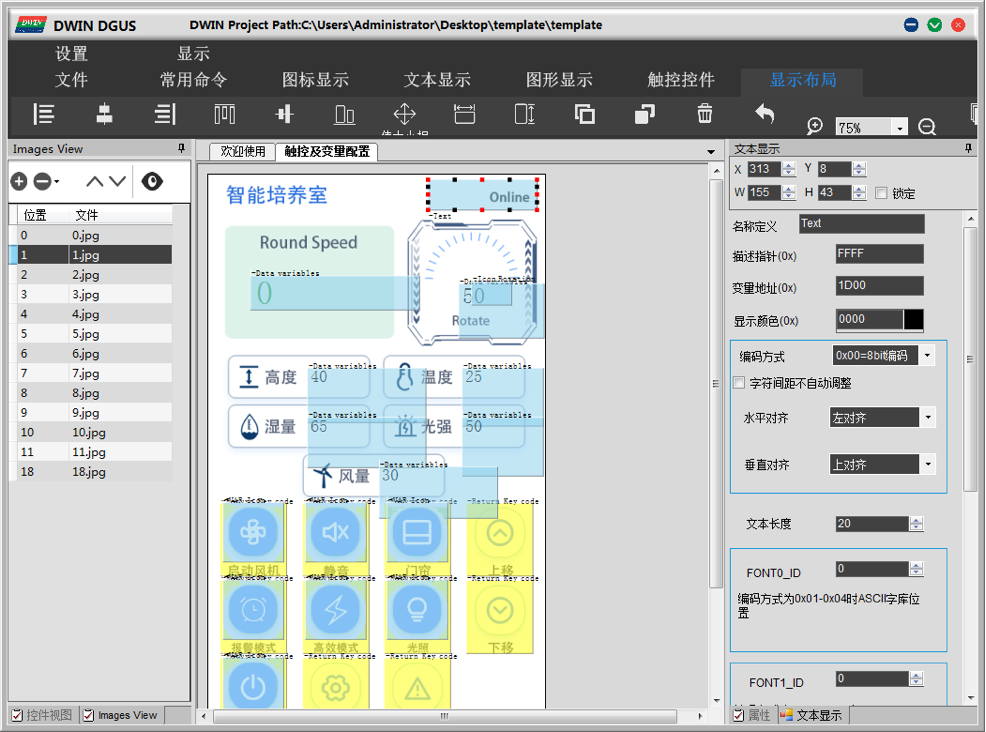
【UI素材展示】

【UI开发示例】
【C51工程设计】
主界面温度、湿度、高度等数据获取和更新,以及使用modbus rtu控制控温模块、电机、报警检测等各个从机的主要代码如下:
主界面代码参考:
#include "main_win.h"
#include "modbus.h"
#include "sys_params.h"
#include "func_handler.h"
#include "uart2.h"
#include <stdio.h>
#include <string.h>
#define TEMP_HUM_SLAVE_ADDR 2
#define TEMP_HUM_VAL_MAX_NUM 2
#define ALERT_BIT_MAX_NUM 30
#define ALERT_BYTE_NUM (ALERT_BIT_MAX_NUM/8+((ALERT_BIT_MAX_NUM%8)!=0))
#define GET_ALERT_BIT(val, pos) ((val[pos/8]>>(pos%8))&0x01)
typedef struct{
char date[17];
u8 desc;
}ALERT;
#define ALERT_TABLE_LEN 20
static u8 btn_sta[MAIN_WIN_BTN_MAX_NUM] = {0};
static u8 btn_addr[MAIN_WIN_BTN_MAX_NUM] = {50, 51, 52, 69, 53, 54, 55, 70, 56, 57, 58, 59};
u16 main_win_val[MAIN_WIN_VAL_MAX_NUM];
u16 temp_hum_val[TEMP_HUM_VAL_MAX_NUM] = {0};
u16 date_val[MAIN_WIN_DATE_MAX_NUM] = {0};
u8 alert_val[ALERT_BYTE_NUM] = {0};
u8 old_alert_val[ALERT_BYTE_NUM] = {0};
ALERT alert_table[ALERT_TABLE_LEN];
u16 alert_num = 0;
bit is_main_win = 0;
void main_win_update()
{
}
void main_win_disp_date()
{
u8 len;
len = sprintf(common_buf, "%u:%u", (u16)date_val[3], (u16)date_val[4]);
common_buf[len+1] = 0;
sys_write_vp(MAIN_WIN_DATE_VP, common_buf, len/2+2);
}
void main_win_process_alert()
{
u8 i;
for(i=0;i<ALERT_BIT_MAX_NUM;i++)
{
if(GET_ALERT_BIT(old_alert_val, i))
continue;
if(GET_ALERT_BIT(alert_val, i))
{
if(alert_num>=ALERT_TABLE_LEN)
alert_num = ALERT_TABLE_LEN-1;
alert_table[alert_num].desc = i+1;
sprintf(alert_table[alert_num].date, "%u/%u/%u %u:%u",
date_val[0], date_val[1], date_val[2], date_val[3], date_val[4]
);
alert_num++;
}
}
memcpy(old_alert_val, alert_val, sizeof(alert_val));
}
void main_win_disp_alert()
{
u16 i;
u16 val;
u16 len = 0;
common_buf[0] = 0;
for(i=0;i<ALERT_TABLE_LEN;i++)
{
val = 0;
if(i<alert_num)
{
val = alert_table.desc;
len += sprintf(common_buf+len, "%s\r\n", alert_table.date);
}
sys_write_vp(ALERT_WIN_DESC_START_VP+i, (u8*)&val, 1);
}
common_buf[len+1] = 0;
sys_write_vp(ALERT_WIN_DATE_VP, common_buf, len/2+2);
}
void main_win_init()
{
float fixed_val;
u8 i;
is_main_win = 1;
main_win_val[5] = (u16)(temp_hum_val[0]/10.0+0.5f);
main_win_val[6] = (u16)(temp_hum_val[1]/10.0+0.5f);
for(i=0;i<MAIN_WIN_VAL_MAX_NUM;i++)
{
if(i==0)
continue;
sys_write_vp(MAIN_WIN_WIND_SPEED_VP+MAIN_WIN_VAL_OFFSET*i, (u8*)&main_win_val, 1);
}
fixed_val = main_win_val[0]/WIND_SPEED_SCALE+FLOAT_FIX_VAL;
sys_write_vp(MAIN_WIN_WIND_SPEED_VP, (u8*)&fixed_val, 2);
}
void main_win_click_handler(u16 btn_val)
{
u8 index;
if(btn_val==0x0B)
{
main_win_disp_alert();
return;
}
index = btn_val-1;
btn_sta[index] = !btn_sta[index];
if((index==3)||(index==7))
btn_sta[index] = 1;
modbus_write_bit(btn_addr[index], btn_sta[index]?0xFF00:0x0000);
btn_val = btn_sta[index];
sys_write_vp(MAIN_WIN_BTN_STA_START_VP+MAIN_WIN_BTN_STA_OFFSET*index, (u8*)&btn_val, 1);
if(index==9)
is_main_win = 0;
else if((index==3)||(index==7))
{
while(sys_get_touch_sta());
modbus_write_bit(btn_addr[index], 0x0000);
}
}
void main_win_msg_handler(u8 *msg,u16 msg_len)
{
u8 f_code = msg[MODBUS_RESPOND_POS_FUNC_CODE];
u8 data_len = msg[MODBUS_RESPOND_POS_DATA_LEN];
u8 i;
u8 offset;
msg_len = msg_len;
if(!is_main_win)
return;
if((f_code==MODBUS_FUNC_CODE_03)&&(data_len==MAIN_WIN_VAL_MAX_NUM*2))
{
offset = MODBUS_RESPOND_POS_DATA;
for(i=0;i<MAIN_WIN_VAL_MAX_NUM;i++)
{
main_win_val = SYS_GET_U16(msg[offset], msg[offset+1]);
offset += 2;
}
main_win_update();
}else if((f_code==MODBUS_FUNC_CODE_01)&&(data_len==ALERT_BYTE_NUM))
{
offset = MODBUS_RESPOND_POS_DATA;
for(i=0;i<ALERT_BYTE_NUM;i++)
{
alert_val = msg[offset];
offset++;
}
main_win_process_alert();
}else if((f_code==MODBUS_FUNC_CODE_03)&&(data_len==TEMP_HUM_VAL_MAX_NUM*2))
{
offset = MODBUS_RESPOND_POS_DATA;
for(i=0;i<TEMP_HUM_VAL_MAX_NUM;i++)
{
temp_hum_val = SYS_GET_U16(msg[offset], msg[offset+1]);
offset += 2;
modbus_write_word(5+i, temp_hum_val);
}
main_win_update();
}else if((f_code==MODBUS_FUNC_CODE_03)&&(data_len==MAIN_WIN_DATE_MAX_NUM*2))
{
offset = MODBUS_RESPOND_POS_DATA;
for(i=0;i<MAIN_WIN_DATE_MAX_NUM;i++)
{
date_val = SYS_GET_U16(msg[offset], msg[offset+1]);
offset += 2;
}
main_win_disp_date();
}
}
void main_win_read_temp_hum()
{
u8 old_slave_addr = SLAVE_ADDR;
sys_params.user_config[5] = TEMP_HUM_SLAVE_ADDR;
modbus_read_words(0, TEMP_HUM_VAL_MAX_NUM);
sys_params.user_config[5] = old_slave_addr;//还原
}
void main_win_handler()
{
static u8 flag = 0;
if(is_main_win)
{
if(alert_read_period==ALERT_READ_PERIOD)
{
alert_read_period = 0;
modbus_read_bits(510, ALERT_BIT_MAX_NUM);
return;
}
if(date_update_period==DATE_UPDATE_PERIOD)
{
date_update_period = 0;
modbus_read_words(180, MAIN_WIN_DATE_MAX_NUM);
return;
}
flag = !flag;
if(flag)
modbus_read_words(0, MAIN_WIN_VAL_MAX_NUM);
else
main_win_read_temp_hum();
}
}
modbus rtu代码参考:
#include "modbus.h"
#include "crc16.h"
#include "sys_params.h"
#define UART_INCLUDE "uart2.h"
#define UART_INIT uart2_init
#define UART_SEND_BYTES uart2_send_bytes
#define UART_BAUD 9600
#define MODBUS_RECV_TIMEOUT (u8)(35000.0f/UART_BAUD+2)
#define MODBUS_SEND_INTERVAL 150
#include UART_INCLUDE
static bit is_modbus_recv_complete = 0;
static u8 modbus_recv_buff[270];
static u16 modbus_recv_len = 0;//接受的总字节长度
static u8 modbus_recv_timeout = 0;//接受溢出时间
static volatile u16 modbus_send_interval = 0;
MODBUS_PACKET packet;
void modbus_init()
{
UART_INIT(UART_BAUD);
}
void modbus_send_bytes(u8 *bytes,u16 len)
{
UART_SEND_BYTES(bytes,len);
}
void modbus_recv_byte(u8 byte)
{
if(is_modbus_recv_complete)
return;
if(modbus_recv_len<sizeof(modbus_recv_buff))
modbus_recv_buff[modbus_recv_len++] = byte;
}
void modbus_check_recv_timeout()
{
if(modbus_recv_timeout)
{
modbus_recv_timeout--;
if(modbus_recv_timeout==0)
{
is_modbus_recv_complete = 1;
}
}
}
u8 modbus_send_packet(u8 *packet)
{
u16 len;
u16 crc;
u8 func_code = packet[1];
while(modbus_send_interval);
if(func_code==MODBUS_FUNC_CODE_10)
{
((MODBUS_10_PACKET*)packet)->byte_num = ((MODBUS_10_PACKET*)packet)->word_num*2;
len = 9+((MODBUS_10_PACKET*)packet)->byte_num;
}else if(func_code==MODBUS_FUNC_CODE_0F)
{
len = ((MODBUS_0F_PACKET*)packet)->bit_num;
((MODBUS_0F_PACKET*)packet)->byte_num = len/8+(len%8?1:0);
len = 9+((MODBUS_0F_PACKET*)packet)->byte_num;
}else
{
len = sizeof(MODBUS_PACKET);
}
crc = crc16(packet,len-2);
packet[len-2] = (u8)(crc>>8);
packet[len-1] = (u8)crc;
modbus_send_bytes(packet,len);
modbus_send_interval = MODBUS_SEND_INTERVAL;
return 0;//成功
}
extern void modbus_msg_handler(u8 *msg,u16 msg_len);
void modbus_handler()
{
u16 crc;
if(!is_modbus_recv_complete)
return;
//校验crc值
crc = ((u16)modbus_recv_buff[modbus_recv_len-2]<<8)+modbus_recv_buff[modbus_recv_len-1];
if(crc16(modbus_recv_buff,modbus_recv_len-2)==crc)
{
modbus_msg_handler(modbus_recv_buff,modbus_recv_len);
}
modbus_recv_len = 0;
is_modbus_recv_complete = 0;
}
u8 modbus_send_fcode(u8 fcode, u16 addr, u16 len)
{
packet.slave_addr = SLAVE_ADDR;
packet.func_code = fcode;//功能码
packet.start_addr = addr;//地址
packet.data_len = len;//写入的值
len = modbus_send_packet((u8*)&packet);
return len;
}





